Présentation du sujet
![]()
Le thème de la coupe 2010 est intitulé Feed The World. Nous devons collecter des fruits et légumes.

Les boules rouges réprensentent des tomates, les boules oranges des oranges et les cylindres jaunes des maïs. Une fois ramassés nous devons déposer les objets dans le bac se situant à l'autre coin de la table.
Le score dépend directement du poids des objets ramassés, les objets les plus lourds sont les plus difficiles à attraper.
Résultats
Avec 450 points, nous avons finis 74ème sur 121 équipes homologuées et 148 équipes inscrites.
Une dizaine de jour avant la coupe, juste pour le fun, des membres du club se lancent dans la construction d'un petit robot dénomé KISS. Il parvient à s'homologuer in extrémis et fini 116ème, il n'est pas dernier ! voir plus d'info sur KISS
Cette année pour la première fois notre club a accueilli l'évènement des Trophées de la Robotique le 20 mars 2010 sur le campus de l'INSA de Rennes.
Historique...
Samedi 22 mai - Bilan
Objectifs
Au début de l'année, nous nous étions fixé trois objectifs :
- Privilégier l'aspect pédagogique
- Orienter les solutions vers le long terme
- Avoir un robot fiable
En ce qui concerne l'aspect pédagogique, tout s'est bien déroulé. Nous avons mis en place des ateliers de formation dans l'informatique et l'électronique notamment. Chacun, y compris les plus anciens du club, a pu apprendre au cours de l'année, dans des domaines et des degrés différents selon les personnes.
La vision à long terme a aussi été notre préoccupation. Tout d'abord, toutes les réalisations que nous avons effectuées cette année peuvent servir de base pour les années futures. Nous avons veillé à créer des cartes électroniques suffisamment génériques pour pouvoir s'adapter à un nouveau règlement. Ainsi la plupart des cartes gèrent plus que ce qui était nécessaire. De plus, des documentations permettront une prise en main aisée rapidement, dès le début de l'année.
Enfin nous avions un objectif de fiabilité. Celui-ci a été atteint à demi seulement.
En effet, la fiabilité se compose de deux éléments qui sont la fidélité (le fait que l'action est répétable) et la justesse (le fait qu'elle corresponde bien à ce que l'on veut).
La fidélité était au rendez-vous (c'est normalement dans notre cas la plus difficile à atteindre) mais la justesse a fait défaut. Cela est dû au fait que les tests n'ont pas été suffisants.
La réalisations de tests sera donc une des préoccupations les plus grandes de l'année prochaine.
Activités
L'année 2009-2010 a été pleine d'activités au club RobotniK : accueil des trophées, participation à la coupe du Trégor, ateliers de formation, participation à la coupe de France, spectacle des clubs...
Cette année a été une année riche et intéressante. Nous continuerons dans ce sens l'année prochaine.
Résultats
Nous parlons ici des résultats à la coupe de France, où le niveau général des robots est élevé.
Le club est en progression puisque notre classement est meilleur que celui de l'an dernier.
Nous sommes néanmoins un peu déçus car notre robot n'a pas exprimé tout son potentiel lors de la coupe.
Il n'est pas question de partir de zéro l'an prochain et de réaliser un nouveau robot entièrement.
Nous pouvons compter pleinement sur le capital consolidé cette année.
Nous orientons le club aujourd'hui dans un développement à long terme.
C'est ainsi qu'il pourra rivaliser avec les grandes équipes actuelles et devenir lui-même le club d'une des meilleures équipes de la coupe.
Les technologies avancées dont il dispose à l'issue de l'année lui permettent en effet de jouer dans la cour des grands dans peu de temps.
Nous travaillons depuis l'année dernière à la création d'une base de connaissance. Le but est de perpétuer le savoir du club pour le transmettre aux futurs membres. Nous essayons de concevoir des systèmes documentés et réutilisables d'une année sur l'autre. C'est en cela que tient la bonne préparation du club.
Notons que cette année a été une grande source de progrès. Tout n'a pas pu être totalement mis au point, ce qui explique en grande partie les problèmes qu'a eu le robot lors de la coupe. L'an prochain nous disperons de suffisamment de recul et de tests pour prétendre à d'encore meilleurs résultats. Même si nous n'avons pas beaucoup évolué en terme de classement, il est certain que le club a connu cette année de réelles avancées décisives.
Il y a bien sûr matière à améliorer le robot sur de nombreux points, mais nous sommes confiants. Il s'agit pour la plupart de retouches mineures qui cumulées amélioreront nettement le robot. Les grands chantiers sont de faciliter les modifications dans l'intelligence et de veiller à la gestion de l'énergie qui pourrait devenir critique d'ici deux ou trois ans si nous ne faisons rien aujourd'hui.
Nous sommes actuellement sur une voie profitable. Il nous tarde de faire mieux l'an prochain et de corriger nos menues erreurs. Nous y travaillons déjà.
12-15 mai - Coupe de France 2010, le déroulement...

Mercredi 12 mai - Départ pour la Coupe de France !!
Nous sommes arrivés sur le lieu de l'évènement en fin d'après midi. Les premiers matchs commencent jeudi à 14h. La première étape consiste à homologuer notre robot.
Homologué... ça consiste en quoi?
Pour être homologué le robot doit répondre aux contraintes imposées par le règlement (hauteur, périmètre ...) et doit passer 2 tests avec succès :
- marquer au moins un point; concrètement le robot doit déposer un élément de jeu (tomate, orange ou ma&is) dans le conteneur
- éviter le robot adverse; un obstable est placé sur la trajectoire du robot, nous devons être capable de l'éviter sans le toucher.
Nous avons passé la soirée et une bonne partie de la nuit à faire des tests et mises au point pour s'homologuer au plus vite.
Jeudi 13 mai - Début des phases d'homologation et Matchs (1er tour)
Après quelques heures de sommeil, nous reprenons le travail.
[12h20] nous avons réussi à homologuer notre robot à temps, nous pourrons participer au premier match! (64 équipes sur 146 ont obtenues l'homologation pour ce prermier match)
[16h50] 1er match, nous jouons contre Projet &Tech' de l'école Telecom St-Etienne
Notre robot ramasse une tomate et en pousse une autre dans le bac, malheureusement à cause d'un bug logiciel la tomate contenue dans le robot n'est pas lâchée dans le conteneur.

Classement au 1er tour: 30ème/64 équipes homologuées.
Vendredi 14 mai - Matchs (2ème, 3ème et 4ème tour)

C'est une journée chargée, nous avons 3 matchs à jouer.
Suite à l'avertissement que nous avons eu au 1er match, nous avons apporté des modifications sur notre algorithme d'évitement:
A la base nous utilisons des capteurs ultrasons (un sur l'arrière et un sur l'avant). Dans 90% des cas ces 2 capteurs suffisent pour éviter le robot adverse.
Pour améliorer le système d'évitement actuel, nous avons ajouté 2 capteurs infra-rouge sur l'avant (à droite et à gauche).
Nous rencontrons des problèmes de positionnement, notre robot passe trop près des épis de maïs et touche sur le coté. Nous avons mis beaucoup de temps pour résoudre ce problème ce qui nous fait perdre plusieurs matchs. Nous remportons tout de même 50 points de défaite par match car notre robot est sorti de la zone de départ à chaque fois.
[10h00] 2ème match, nous jouons contre ESEO Chomp
Nous recevons un avertissement de la part des arbitres pour dégat sur la table, notre robot a fait une marque sur un maïs en tappant dedans.
Classement au 2ème tour: 46ème/93 équipes homologuées avec 300 points.
[13h45] 3ème match, nous jouons contre COMET - Supélec Campus de Metz
Les arbitres nous font remarquer encore une fois que nous robot à un peu abimé la table mais heureusement pour nous ils ont été tolérants et nous n'avons pas reçu d'avertissement.
Notre adversaire ne parvient pas à sortir de la zone de départ, nous sortons donc vainqueur de ce match.
Classement au 3ème tour: 59ème/99 équipes homologuées avec 350 points.
[17h25] 4ème match, nous jouons contre xD
Nous recevons un avertissement de la part des arbitres pour dégat sur la table.
Classement au 4ème tour: 66ème/105 équipes homologuées avec 400 points.
Avant de manger nous retrouvons les autres INSA pour faire une photo de groupe avec toute la maison !
Le soir nous parvenons à résoudre le problème de positionnement, nous refaisons un calibrage pour ajuster plusieurs paramètres du robot. Nous réalisons plusieurs tests sur une vraie table de jeu, notre robot arrive à mettre plusieurs tomates dans le conteneur à chaque fois. La fiabilité est là, c'est très encourageant, notre robot est prêt pour le dernier match.
Samedi 15 mai - Matchs (5ème tour)
Le matin nous avons refait plusieurs tests, notre robot marque des points à chaque fois. Nous sommes assez confiant pour le dernier match.
[9h35] 5ème et dernier match, nous jouons contre SwapadeG

Le match commence, le robot est parti, il sort de la zone... et s'arrête et fait demi tour comme s'il cherchait à éviter un obstacle, il n'y avait pourtant rien sur son passage. La victoire semble compromise
Après analyse du problème, nous pensons que cela est du aux capteurs infrarouge utilisés pour l'évitement. L'équipe adverse utilisant les même capteurs, les notres ont du être pertubés. Nous avions pensé à cet éventuel problème et nous avons mis en place un système de filtrage pour éliminer les mesures abérantes mais celui-ci est visiblement insuffisant.
Nous sommes un peu déçus de terminer comme ça, car notre robot n'a pas exprimé tout son potentiel durant les matchs. Ci-dessous une petite demonstration illustrant les capacités de notre robot.
Classement final (5ème tour): 74ème/121 équipes homologuées (et 148 équipes inscrites) avec 450 points.
Samedi 13 Mars 2010
Quelques news en direct de la Coupe du Trégor. Cet évènement nous permet d'effectuer des tests en conditions réelles afin de mieux se préparer pour la coupe officielle qui se déroulera dans 2 mois.
Nous sommes arrivés à sur le lieu de l'évènement en début de matinée, nous avons été très bien accueillis.

- Les tests réalisés sur la base roulante de test sont concluants puisque nous avons réussis à marquer un point, ce qui constituait un de nos objectifs.
- Pour l'autre base roulante, les tests ont mis en évidence quelques problèmes. Il reste des mises point à faire et des choses à revoir.
Jeudi 18 Février 2010
Beaucoup de projets avancent au club dans tous les domaines. L'ojectif du moment est d'avoir un robot fonctionnel pour participer à la coupe du Trégor le 13 mars prochain.
Pour le moment, c'est en bonne voie : le robot roule bien, l'intelligence est aux commandes, les informations circulent... et des nouveautés arrivent régulièrement.
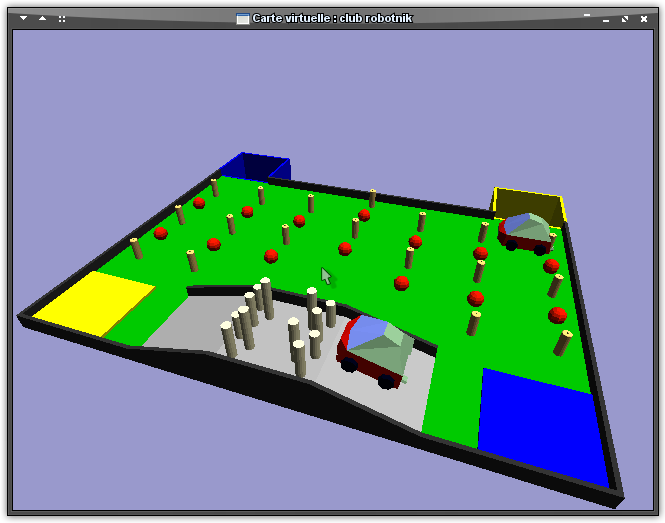
Parmi les nouvelles récentes, il y a l'arrivée d'un visualisateur, à la fois outil de débuggage et joli support visuel. Il affiche en direct la position du robot.
Samedi 30 Janvier 2010
Notre robot se déplace!
La base roulante de test, celle qui nous servira à faire les tests en attendant d'avoir la vraie base roulante, fonctionne très bien.
Les premiers tests du déplacements s'avèrent concluants.
Un petit aperçu...
Comme on peut le voir, l'odométrie est particulièrement précise puisque robot revient très proche de sa position initiale. De plus nous n'avons pas encore effectué toutes les mises aux point prévues donc la précision devrait encore s'améloirer.
Toutes les autres cartes électroniques du robot ont été tirées cette semaine, nous sommes actuellement en train d'y souder les composants dessus.
Mercredi 6 janvier 2010
Notre équipe vous adresse ses meilleurs voeux pour cette année 2010 !
Notre robot commence à prendre forme, l'usinage de la base de test est terminé et le montage presque achevé. Tout est prêt pour procéder aux tests du déplacement, en ce moment nous sommes juste un peu occupé par cette période d'examen.
Vous verrez bientôt une video, c'est promis.
Dimanche 22 novembre 2009
La réalisation du robot progresse
- L'équipe informatique qui est responsable de l'intelligence du robot a déjà implémenté un bon nombre de fonctionnalités.
- L'équipe électronique conçoit les schémas de ses cartes électroniques et détermine les compsants qui seront utilisés.
- L'équipe mécanique a fini la modélisation CAO de la base roulante de test, cette dernière est partie en production (Nous éspérons l'avoir avant la fin de l'année). La modélisation de la base roulante pour la Coupe est bien avancée.
Mardi 13 octobre 2009
Nous nous sommes orientés vers une solution. Les groupes de travail on été constitués, nous passons à la partie conception et réalisation.
Notre club regroupe désormais 45 inscrits.
Mardi 6 octobre 2009
Le sujet nous à été dévoilé. Nous élaborons les solutions et stratégies pour la coupe de France de robotique 2010.